-

深圳市欣东港贸易有限公司
主营:焊接机械手,机器人焊机,机械手焊机,激光自动化焊接,全自动焊接设备,折弯自动化

深圳市欣东港贸易有限公司
主营:焊接机械手,机器人焊机,机械手焊机,激光自动化焊接,全自动焊接设备,折弯自动化 14
14

执行机构 :机械手的执行机构分为手部、手臂、躯干。
手部安装在手臂的前端。手臂的内孔中装有传动轴,可把运用传给手腕,以转动、伸曲手腕、开闭手指。机械手手部的构造系模仿人的手指,分为无关节、固定关节和自由关节3种。手指的数量又可分为二指、三指、四指等,其中以二指用的较多。可根据夹持对象的形状和大小配备多种形状和大小的夹头以适应操作的需要。所谓没有手指的手部,一般都是指真空吸盘或磁性吸盘。
手臂的作用是引导手指准确地抓住工件,并运送到所需的位置上。为了使机械手能够正确地工作,手臂的3个自由度都要精确地定位。
躯干躯干是安装手臂、动力源和各种执行机构的支架。对动作复杂的机械手,采用求教再现型控制系统。更复杂的机械手采用数字控制系统、小型计算机或微处理机控制的系统。 控制系统以插销板用的较多,其次是凸轮转鼓。它装有许多凸轮,每一个凸轮分配给一个运动轴,转鼓运动一周便完成一个循环。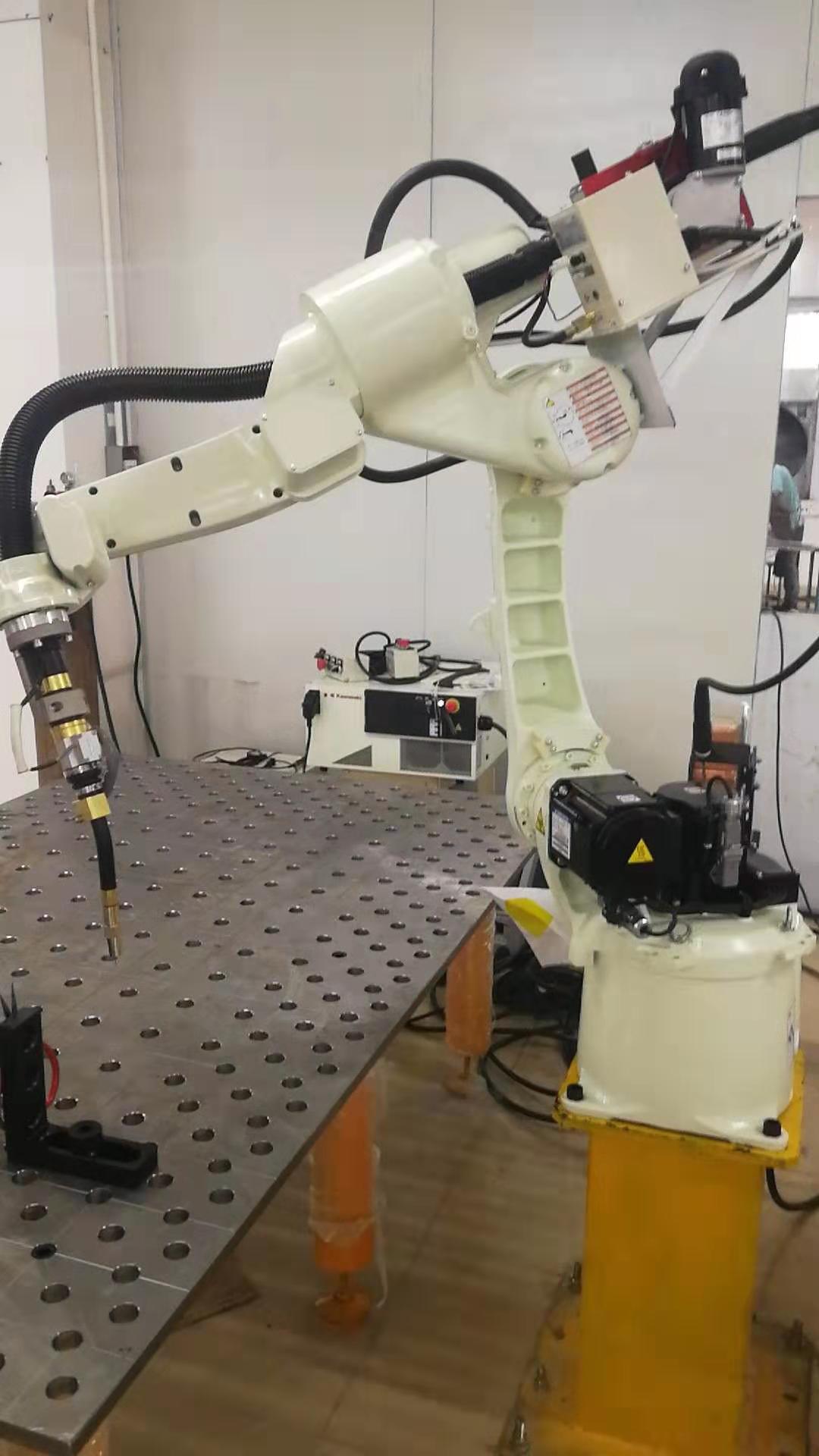
3月21日,中交三公局路泽太高架桥工程*TJ01标项目部钢筋加工厂里,一个来回移动进行焊接作业的“机械手”吸引众人目光,几分钟后,一个墩柱箍筋就焊接完成了。
机械手焊接设备节约焊丝、提高焊接产品质量、提高生产效率、降低对熟练焊工的依赖
机械手焊接设备在现在的中国才刚刚起步,随着智能化和自动化的提升,这里边肯定是大有前途的