-

深圳市欣东港贸易有限公司
主营:焊接机械手,机器人焊机,机械手焊机,激光自动化焊接,全自动焊接设备,折弯自动化

深圳市欣东港贸易有限公司
主营:焊接机械手,机器人焊机,机械手焊机,激光自动化焊接,全自动焊接设备,折弯自动化 14
14
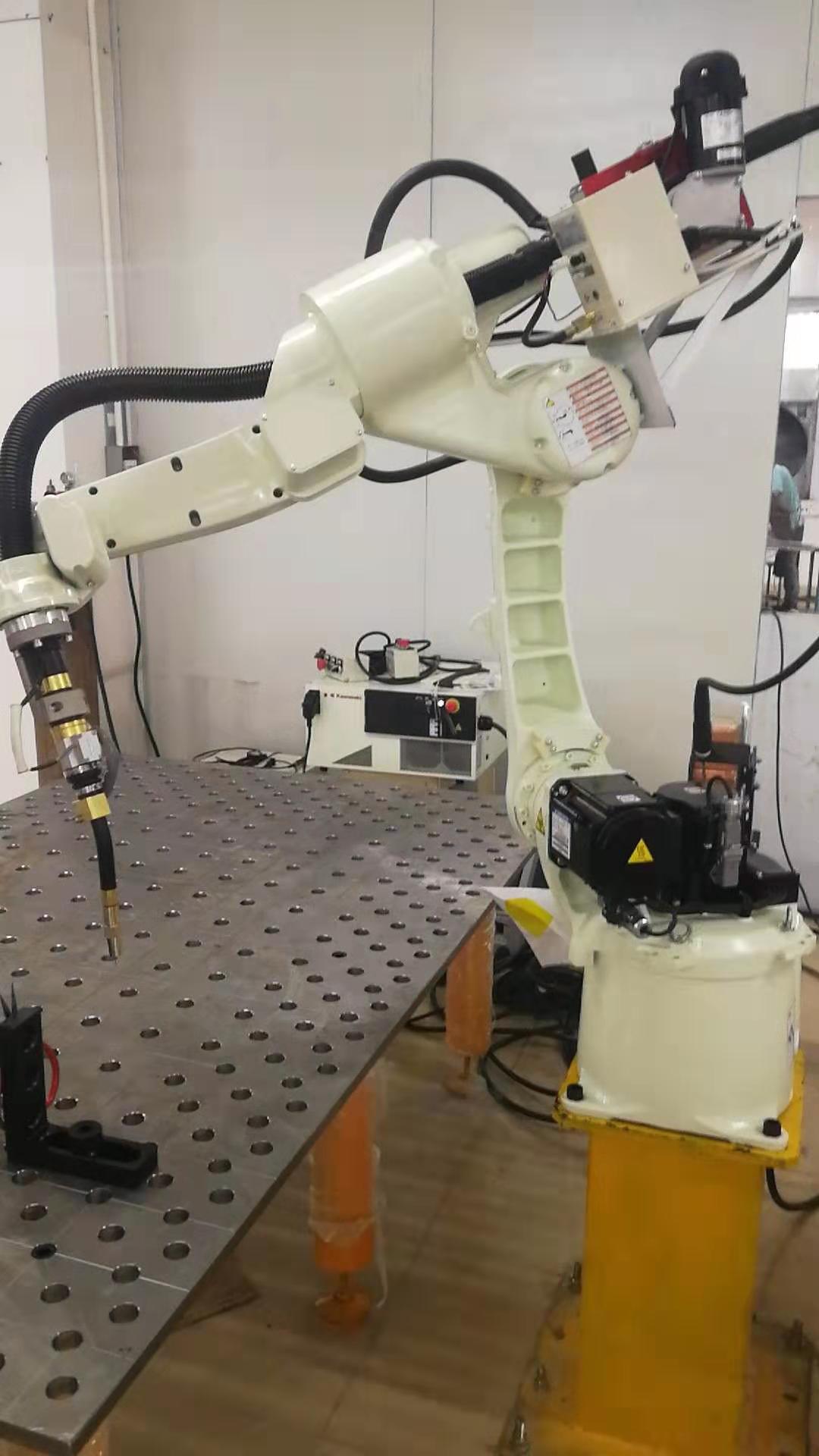
焊接机械手控制的要素包括工作顺序、到达位置、动作时间、运动速度、加减速度等。机械手的控制分为点位控制和连续轨迹控制两种。
机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。焊接机械手是专注于焊接设备的机器人。
现代工人更追求工作的安全及舒适,导致用工成本的不断增长,各种职业病防护也需要投入不少资金。相比之下,焊接机械手可以避免很多问题,完全是任劳任怨,一丝不苟的完成任务。一次投入,终身受益,三五个月就能收回设备成本,甚至更短的时间就能收回。如果焊接机械手搭配自动上料机构,一个工人就可以同时操作很多台设备,从而达到节省生产成本。机械手构造主要由执行机构、驱动机构和控制系统三大部分组成。 手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度 。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机 械手设计的关 键参数。自由 度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般**机械手有2~3个自由度。控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的核心通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。